Building things that perceive, act and learn.
Mostly harmless robotics engineer & computer scientist with a passion for mathematics.
Help me change my frame of reference
About
Hey there, I'm Magnus.
I am a first year PhD student working to bring together robotics and modern AI. While Transformers, Diffusion Models and co. have revolutionized how we represent and interact with information, I believe making robots truly intelligent requires a deeper grounding in first principles.
This grounding must come through inductive biases — mathematical structures that capture the regularities of our world, allowing learning systems to exploit them more effectively.
For me, the most promising frameworks lie in Information Theory, Optimization, and Lie Theory — the languages of uncertainty, efficiency, and symmetry.
I also believe that classical results from control, planning, and simulation remain essential foundations — the challenge lies in integrating them with learning-based models to achieve reliable and generalizable robotic behavior.
Outside of research, where I am slowly but surely gradient descending into the local minimum many refer to as madness, I'm also an avid reader, traveler, and gym rat.
To learn more, pick a vector (category) to see which eigenvectors contribute (favorites):
News
Coming Soon ...
Contact
Email: magnus.dierking@tu-darmstadt.de
GitHub: github.com/magnusdierking
Paper
 Real-World Deployment of Massively Parallel SMPC
for Contact-Rich Manipulation
Real-World Deployment of Massively Parallel SMPC
for Contact-Rich Manipulation
Results of my master thesis presented at the ICRA 2026 Workshop on Frontiers of Optimization for Robotics in Vienna.
View Paper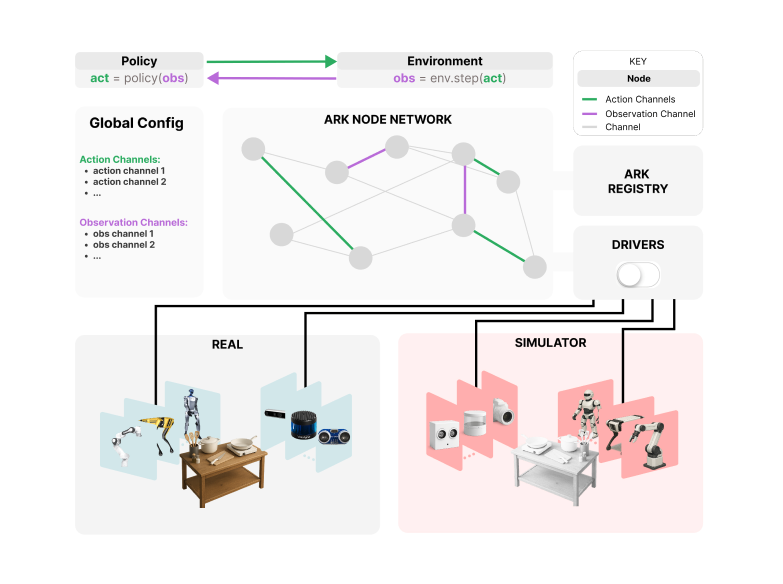 Ark
Ark
Open-source, Python-first robotics framework that provides a Gym-style interface for collecting data, training policies, and switching seamlessly between simulation and real-robot deployment. It includes reusable modules for control, SLAM, motion planning and visualization, and integrates natively with ROS to accelerate end-to-end robotics research.
View Paper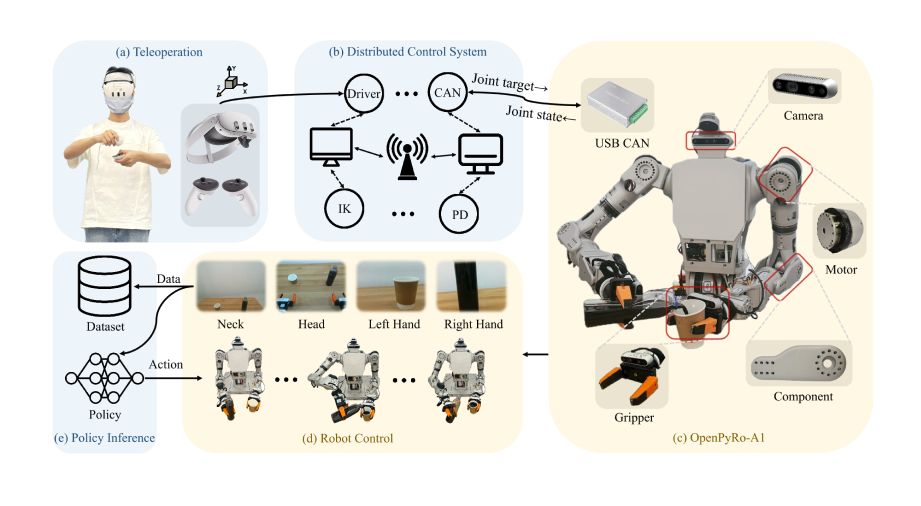 OpenPyro-A1
OpenPyro-A1
Open-source, low-cost bimanual half-humanoid robot designed for advanced manipulation research. It features a modular, repairable hardware design and supports coordinated two-handed tasks such as folding, cutting, and assembling. The platform enables teleoperation via a Meta Quest 3 and provides interfaces for learning-based controllers to support scalable, real-world robotics experimentation.
View Paper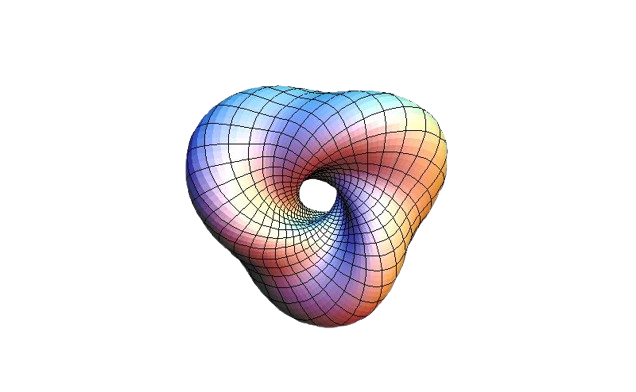 More
More
Yeah, yeah, I'm working on it ...
University Projects
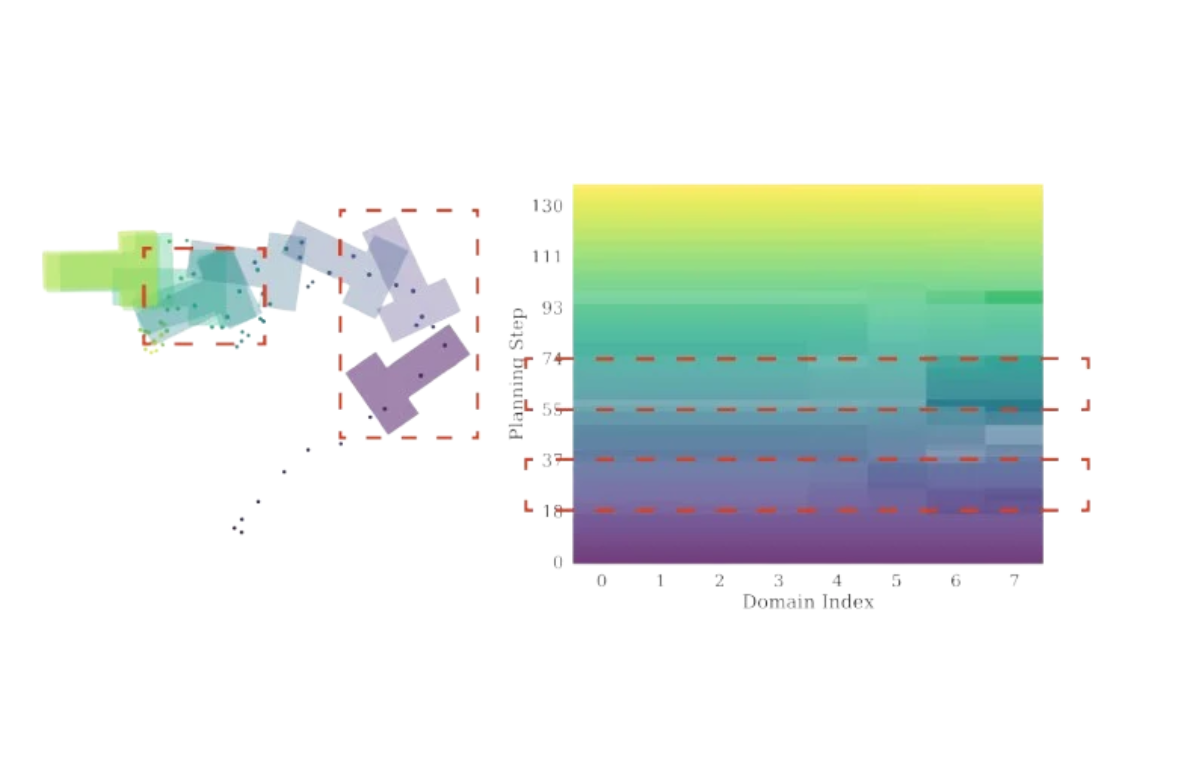
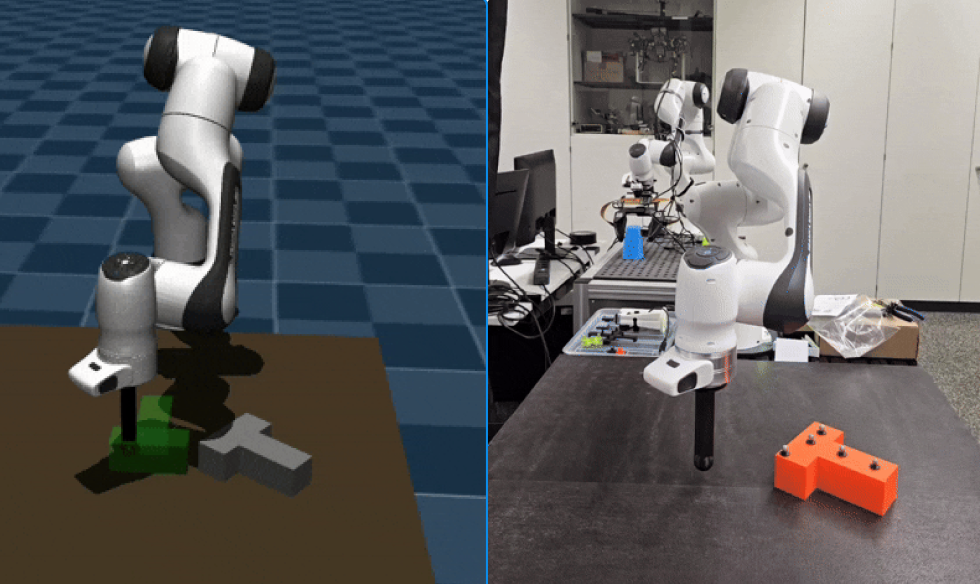 Domain Randomized Deployment of Massively Parallel MPC
Domain Randomized Deployment of Massively Parallel MPC
Designed a real-to-sim-to-real pipeline coupling GPU-accelerated sampling-based MPC with MuJoCo MJX and a Franka Research 3 for contact-rich manipulation on the Push-T task. Demonstrated robust real-time planning that reliably escapes local minima and handles mode-switching, outperforming standard baselines. Analyzed online domain randomization limits, showing contact-initiation parameters provide stronger adaptation signals than global physics in real-time contact-rich settings.
View PDF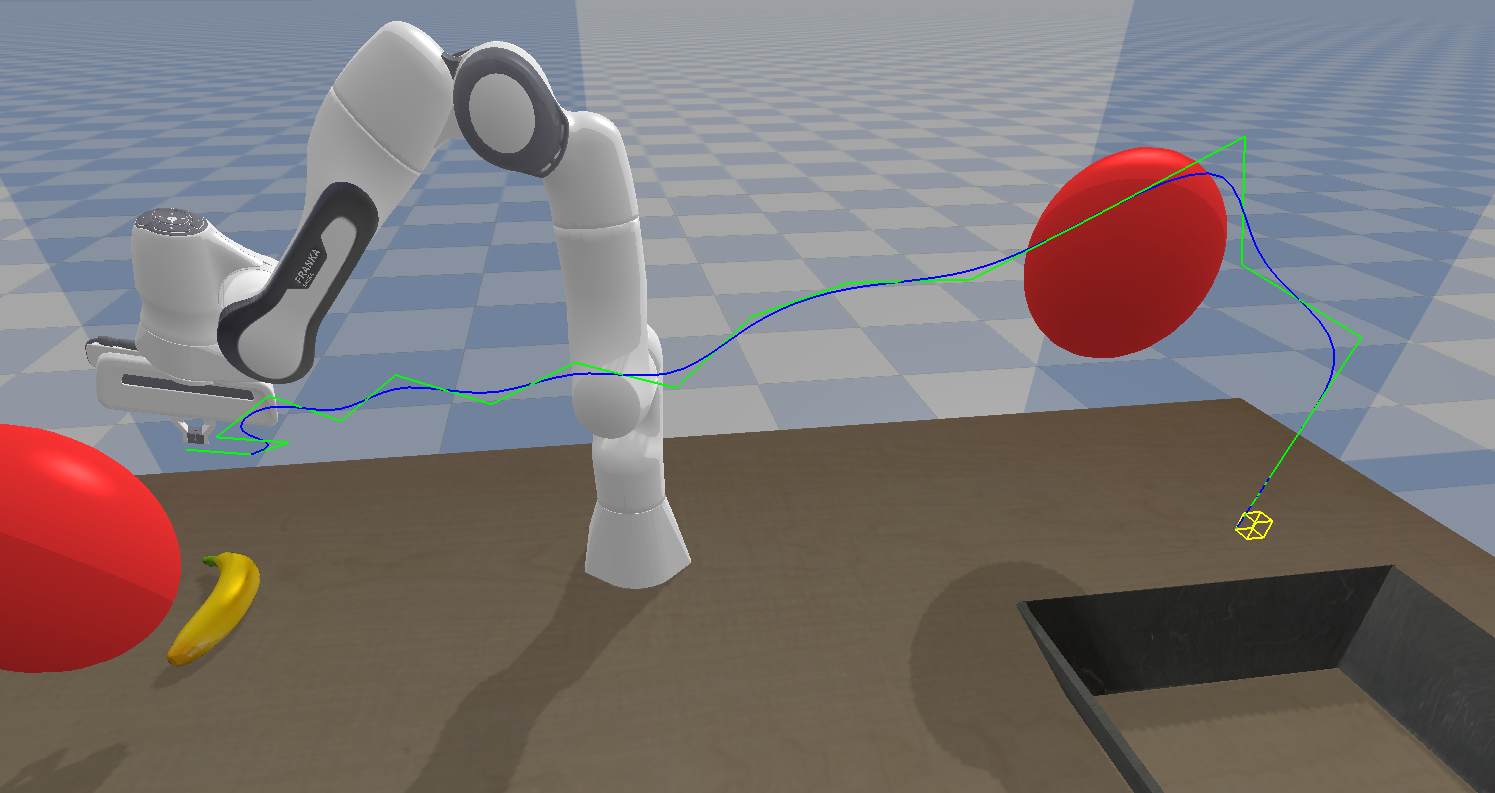 Evasive Pick and Place
Evasive Pick and Place
Developement of a robotic control system for a Franka Emika Panda in a dynamic simulation environment. Focused on enabling the robot to grasp and transport objects while evading randomly moving obstacles. The pipeline integrates real-time object tracking, advanced inverse kinematics with secondary objectives, and sampling-based motion planning to achieve adaptive, collision-free manipulation. Part of the "Intelligent Robotic Manipulation" course at the Technical University of Darmstadt.
View PDF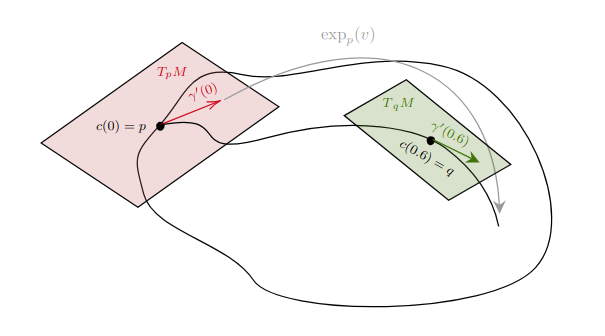 SO(3) Diffusion Model
SO(3) Diffusion Model
Project report exploring the mathematical structures behind 3D rotations and rigid body transformations through Lie Theory. A deep dive into the underlying theory and its applications, presented in an intuitive and visual way. The project includes the implementation of a Diffusion Model on the manifold SO(3) and explores the impact of using non-Euclidean Brownian noise and geometric loss metrics. Part of a self-organized personal student project.
View PDF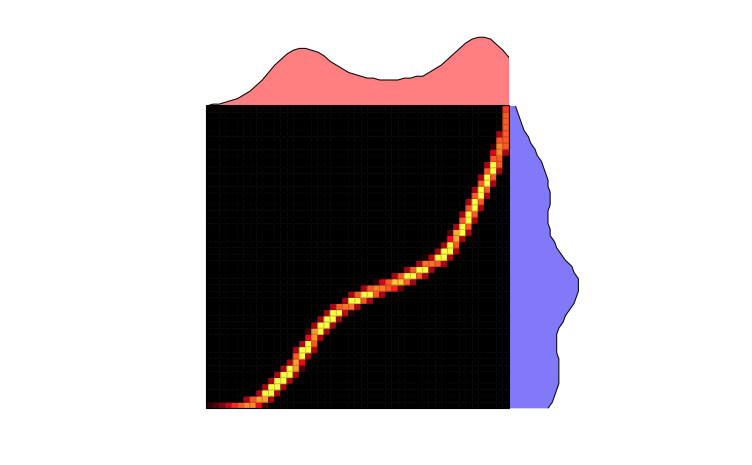 Optimal Transport Seminar
Optimal Transport Seminar
Personal project report exploring the connection between information theory and optimal transport through the InfoOT framework. Studied how mutual information and entropic regularization can be combined to align data distributions, supported by implementations using Sinkhorn optimization and kernel density estimation. Part of a self-organized seminar following the book "Computational Optimal Transport" by Gabriel Peyré and Marco Cuturi.
View PDF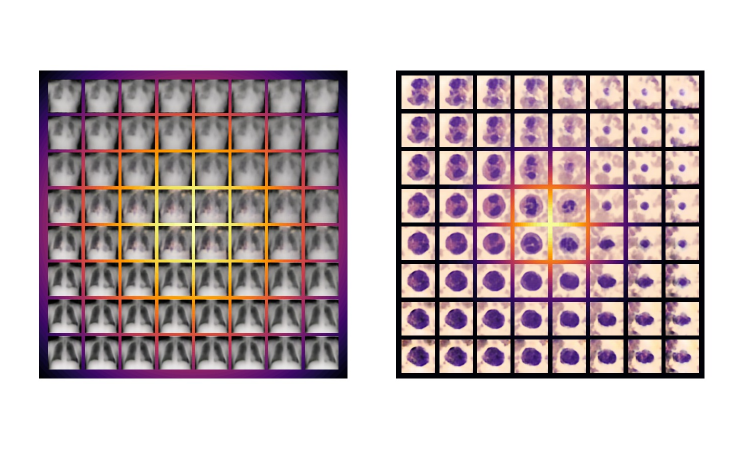 Medical Imaging VAE
Medical Imaging VAE
Developement of a conditional VAE trained on a combination of medical imaging datasets. Focused on learning structured latent representations conditioned on metadata such as imaging modality or pathology. Explored data harmonization, cross-domain generalization, and visual synthesis to evaluate how conditioning improves generative performance across heterogeneous medical data. Part of the "Generative Models" course at the Technical University of Darmstadt.
 Parallel Solution of Linear Systems arising in Domain Decomposition Methods
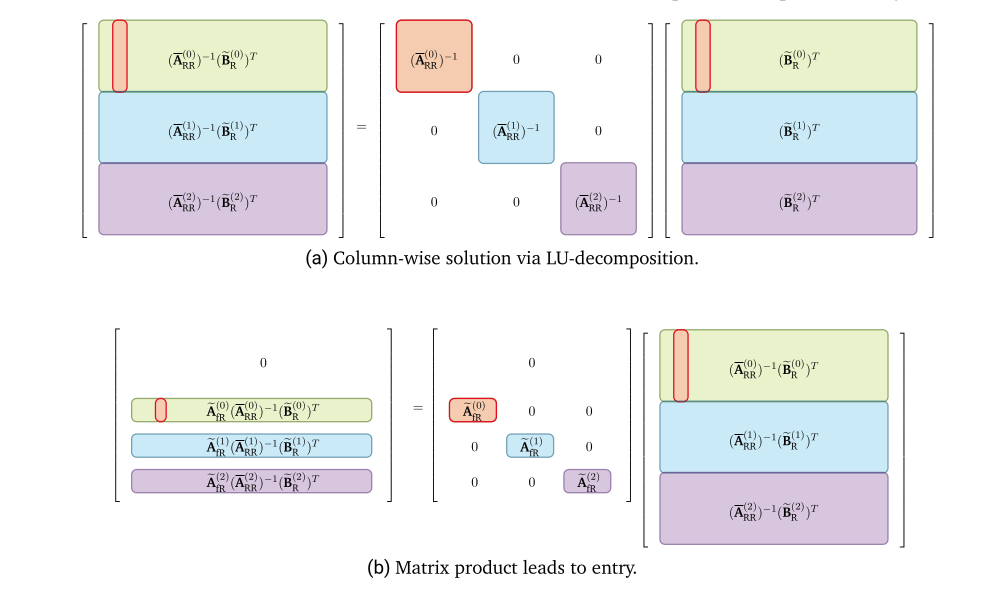
Parallel Solution of Linear Systems arising in Domain Decomposition Methods
Implementation of a parallel solver for large-scale surface PDEs within an Isogeometric Analysis (IGA) framework. Developed a C++ implementation of the dual-primal IETI-DP algorithm based on Schur decomposition, enabling efficient parallel solutions of domain-decomposed problems. Verified the implementation on the Laplace–Beltrami operator using spherical harmonics, achieving the expected convergence behavior and strong runtime scaling.
View PDFMy Notes
After my Bachelor’s thesis, I began building a personal knowledge base using Obsidian — a habit that has grown with me through my Master’s, internship, and side projects.
Over time, it has evolved into a repository of thoughts, ideas, and notes spanning computer science, robotics, mathematics, and everything in between.
These notes are, and will always be, a work in progress — small attempts at understanding a universe that clearly didn’t come with documentation.
They’re less a collection of answers than a record of me trying to figure things out. Because of that, their quality ranges from near-empty stubs and quick sketches through half-formed ideas to blog-ready articles.
I also use several custom callouts and plugins that aren’t preserved when exporting, so some interface elements may look a little off. Also, I recommend selecting light mode.
Currently, images and other media are not included in the export. If you have any questions, suggestions, or just want to chat about the content, feel free to reach out!